栏目导航

以灯光控制为例说明LIN总线在车身控制中的应用
文章出处:工程案例 发表时间:2024-08-10 05:56:50
摘要:随着车内电控单元的增加,车内通讯网络也日趋多样化。汽车电子协会(SAE)将车内通讯网络分成四类,其中A类低速网络主要使用在在(Local Interconnect Network)是多家汽车制造商与半导体公司为降低通讯成本提高性能所提出的符合A类的通讯标准。
由于车内电控单元的增多导致车内线束大量增加,这带来了很多问题:减少了布局空间;
给制造和安装增加了难度;当增加额外的功能时将会增加线束,使性价比难以改善;大量线束增加了车的重量,这不利于提高燃油效率和性能;数量众多的连接点增加了故障隐患。因此车内引入通讯网络来管理逐渐增多的电子器件是非常必要的。汽车网络能够灵活方便的集成各子系统以此来实现更复杂的系统,同时减少了车内线束和车重量,减少了由电控单元带来的成本的增加,并且提高了系统的可靠性。车内通讯网络种类很多,汽车电子协会(SAE)将车内通讯网络分成四类,见下表:
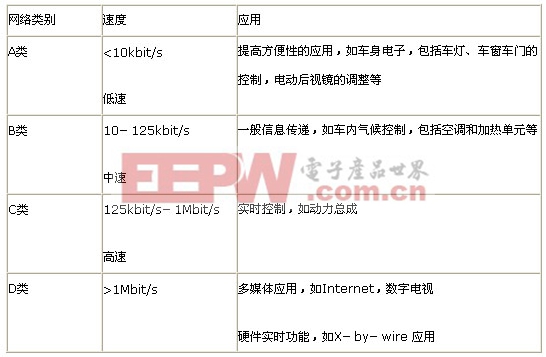
电控单元之间的通讯根据对通讯带宽和通讯速度的要求选不一样的通讯网络。车身控制部分的电控单元由于传输的数据量比较少且对实时性要求不高,所以车身控制部分采用A类低速通讯网络即可。目前很多车身控制解决方案中采用CAN的低速网络来实现通讯。而最近多家汽车制造商与半导体公司共同制定了可实现车内舒适性和方便性应用的低速网络的通讯标准,该项通讯标准便是LIN。由于LIN是基于通用的SCI/UART接口的,不像CAN需要专用的控制器,而且LIN是单线传输的,其通讯成本要低于CAN,因此用LIN来代替原有的低速CAN,能够更好的降低系统成本提高系统性能。
LIN总线的方案是由众多汽车制造商与半导体公司创建的,其目的是为了找到更低成本的子总线网络,作为使用广泛的CAN通讯网络的辅助。LIN网络是基于主从结构的,使用单线通讯,减少了大量线束的重量和费用。LIN目标应用是不需要CAN的性能、带宽及复杂性的低速系统,如
开关类负载或位置型系统包括车的后视镜、车锁、车座椅、车窗等的控制。LIN更有助于实现汽车中与CAN网络连接的分布式控制系统。
低成本的单线v数据传输,线的驱动和接收特性符合改进的ISO 9141单线标准
基于通用UART/SCI的硬件接口,使用成本低的半导体工艺实现,几乎所有的微控制器都有LIN 必需的硬件
从节点不需要晶振或陶瓷振荡器就可实现自同步,由此减少了从节点硬件成本
保证在最差状况下信号传送的等待时间,来避免总线 LIN的通讯协议和数据帧格式
LIN网络由一个主节点和多个从节点构成。所有的节点都包括一个从任务(slave task),从任务又分成发送和接受任务,主节点还包括一个主任务(master task)。在LIN网络中所有通讯都是由主任务发起的,如下图所示。主任务发送一帧头(message head)给所有的从任务,帧头由三部分所组成:同步间隔(synch break),同步场(synch field)和信息识别符(identifier)。
从任务通过信息识别符来判断是否响应主任务,若需要响应主任务则开始发送响应信息。响应信息由2,4或8个数据字节和1个校验和字节组成。
信息识别符表示的是信息的内容,而不是信息的目的地址。这样定义可使多个节点收到同样的信息,并且数据能够以多种方式交换。数据可以从主节点发送到一个或多个从节点,也可以通过从节点发送给主节点或其他从节点。因此从节点之间通讯并不是特别需要经过主节点,并且主节点可以将信息广播给网络内的所有节点。主节点中的主任务控制数据帧的发送时序和优先级。
主节点传送信息到从节点,而从节点只在主节点询问时才传送信息。从节点仅在需要发出唤醒信息的时候才主动地发送信息。
LIN的数据帧由帧头和响应信息组成,如图1所示。帧头由主任务发出,主任务在发出同步间隔后发送同步场(0x55),从节点利用同步场将它的波特率调整到传送来的信号的波特率。之后,发送一字节的信息识别符,其中0~3位表示信息类别,4~5位表示信息长度,7~8位是奇偶校验。从任务通过该字节判断数据是不是自己有关,并确定自己怎么样处理该数据。响应信息是由从任务发出的,由2个、4个或8个字节长度的数据和1个字节的和校验构成。和校验(checksum)表示数据帧结束,和校验是通过计算数据的全部字节而得到的(不包括识别字节及同步场)。
LIN 总线的另一个帧是睡眠帧,由主任务发出,它的作用是让总线和节点进入低功耗状态。睡眠帧的识别字段包含数值 0x80之外,除此之外,睡眠帧与数据帧是相似的。当收到唤醒信号时,总线睡眠状态便中止。唤醒信号由从任务发出。
LIN的物理接口如下图所示,LIN的物理接口是基于通用的SCI (UART)的硬件接口的,SCI (UART)接口是几乎所有的微处理器都集成的硅模块,因此使用LIN更便利。LIN是单线传输数据的,每个节点通过上拉电阻线与总线,电源从汽车电源网络获得VBAT。和上拉电阻串联的二极管可以有效的预防电子控制单元ECU 在本地电池掉电的情况下通过总线. Lin车身控制应用方案
车身控制管理系统最重要的包含灯光控制模块,车门控制模块和仪表显示模块等,这些模块的基础原理是采集各种开关的状态量依据这一些状态量来驱动负载动作,所以车身控制管理系统的控制对象主要是不一样的功率的灯、低速电机、电磁阀和开关量器件。它们对信息传输的实时性要求不高, 因此车身控制管理系统的通讯网络采用A类标准就可以。LIN正是众多汽车生产商与半导体公司联合提出的A类车用通讯网的开放总线协议标准。同时考虑到车身控制管理系统对成本比较敏感,LIN以其低成本的优势成为车身控制管理系统网络的首选。
下图给出了卡车车身控制管理系统的解决方案。车身控制管理系统的这些电控模块与汽车驱动系统分开有利于保证驱动系统的实时性,这也是汽车内通讯网络分级的一个原因。车身控制管理系统的中央控制模块也是一个网关,将CAN网络和LIN网络连接起来。
本文选取中央控制模块和灯光控制模块来说明LIN总线的应用。中央控制模块位于车的驾驶室内,主要检验测试驾驶室内控制开关的状态,并依据这一些控制开关的状态实现相应的控制策略,然后将控制命令通过LIN总线发送给向各子模块,同时通过CAN总线接收上层CAN网络的某些信息。中央控制模块的MCU选用Motorola公司的08系列单片机MC68HC908GZ16,该芯片是一款可靠性高和抗干扰能力强的汽车专用芯片,其内部集成了CAN的控制器,并有SCI模块,这方便了CAN和LIN的开发。中央控制模块中的CAN接口芯片采用Motorola公司的MC33388,LIN的接口芯片采用Motorola公司的MC33399。中央控制模块的POWER单元作用是将车内24v电压转换成5v供给MCU。DETECT单元作用是采集开关量的状态,将并行的数据转换成串行数据送给MCU。中央控制模块还能够准确的通过不一样的需求增加驱动单元,在本例中,中央控制模块还完成了驱动车内的内饰灯和雨刷电机的工作,驱动芯片分别选取Motorola公司的MC33286和MC33289。
灯光控制模块有两块,分别位于车的前部和后部,主要控制前部和后部的车灯。灯光控制模块的MCU采用Motorola公司的低成本的单片机MC68HC908EY4,驱动芯片根据车灯所需功率来选取,本文选取了多片Motorola公司的MC33288和MC33286。
LIN总线在车身控制管理系统的应用,降低了低端通讯网络的成本,同时增加了设计的灵活性,提高了系统的可靠性,有利于分布式车身控制管理系统的开发。因此LIN总线在汽车领域有着良好的应用前景,此外LIN总线作为一种开放协议,还可用在工业和家电领域,实现对速度要求不高,短距离连接的设备间的通讯。